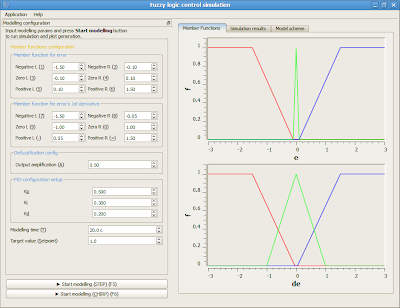
The following application simulates control of an object using configurable fuzzy logic controller. Its database of rules and object transfer function is currently hardcoded. However there's an option to configure everything else of the fuzzy logic controller (FLC - refer to wikipedia).
Here's the main window at start up:
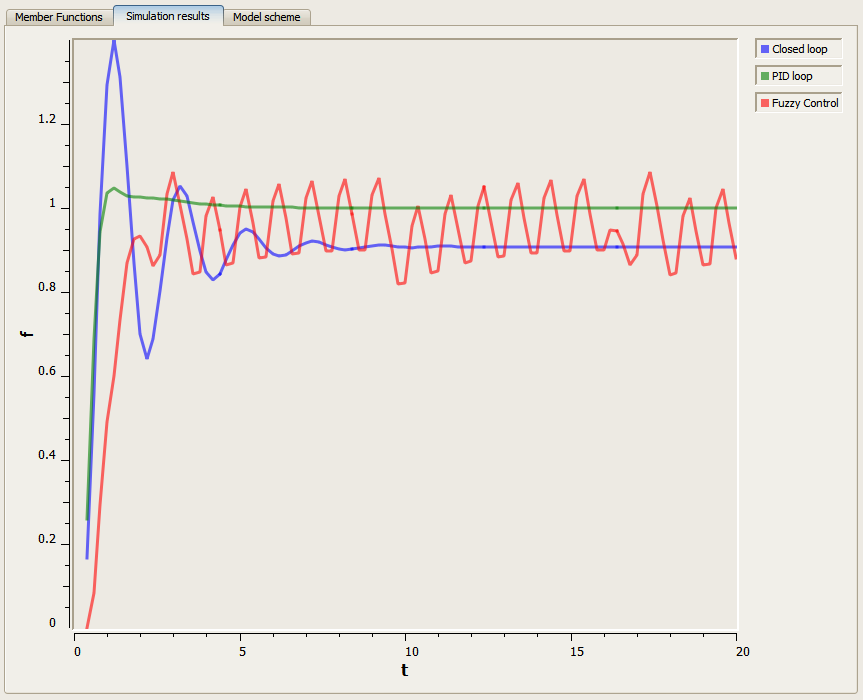
 After simulation run, the transition process may be seen on a Simulation results page:
After simulation run, the transition process may be seen on a Simulation results page:
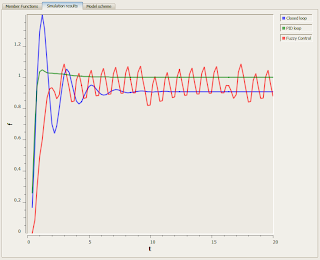 The output plot draws modelling results for closed loop run (without control), PID control (with customized parameters) and FLC configuration.
The output plot draws modelling results for closed loop run (without control), PID control (with customized parameters) and FLC configuration.
This FLC implements simplest behavior. However, the source code is open for modifications (download links below).
Some functionality is still missing (chirp signal input, simulated error plot and plot for derivative of error, etc.).
Source code is written in C++ (mingw) + Qt SDK 1.1. Plots are drawn with Qwt project QwtPlot widget. Application is open source MIT or LGPLv3.
source code (zip): Source_XCtrlFuzzy - version 1.0 - 7.79 MiB
Here's the main window at start up:

This FLC implements simplest behavior. However, the source code is open for modifications (download links below).
Some functionality is still missing (chirp signal input, simulated error plot and plot for derivative of error, etc.).
Source code is written in C++ (mingw) + Qt SDK 1.1. Plots are drawn with Qwt project QwtPlot widget. Application is open source MIT or LGPLv3.
Download link:
application archive (zip): Public_XCtrlFuzzy - version 1.0 [Win32/i386] - 4.34 MiBsource code (zip): Source_XCtrlFuzzy - version 1.0 - 7.79 MiB

No comments:
Post a Comment